




Belajarlaserteknik penjajaran
Memastikan penjajaran pancaran laser adalah tugas utama proses penjajaran. Ini mungkin memerlukan penggunaan optik tambahan seperti kanta atau kolimator gentian, terutamanya untuk diod atausumber laser gentianSebelum penjajaran laser, anda mesti biasa dengan prosedur keselamatan laser dan memastikan anda dilengkapi dengan cermin mata keselamatan yang sesuai untuk menyekat panjang gelombang laser. Di samping itu, untuk laser yang tidak kelihatan, kad pengesanan mungkin diperlukan untuk membantu usaha penjajaran.
Dalampenjajaran laser, Sudut dan kedudukan pancaran perlu dikawal serentak. Ini mungkin memerlukan penggunaan pelbagai optik, menambahkan kerumitan pada Tetapan penjajaran dan boleh mengambil banyak ruang desktop. Walau bagaimanapun, dengan pelekap kinematik, penyelesaian yang mudah dan berkesan boleh diguna pakai, terutamanya untuk aplikasi yang terhad ruang.
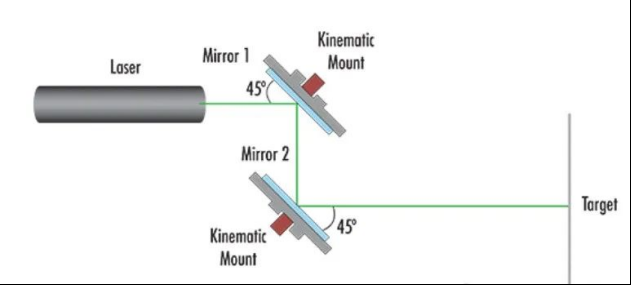
Rajah 1: Struktur selari (lipatan-Z)
Rajah 1 menunjukkan persediaan asas struktur Lipatan-Z dan menunjukkan sebab di sebalik namanya. Dua cermin yang dipasang pada dua pelekap kinematik digunakan untuk anjakan sudut dan diletakkan supaya pancaran cahaya datang mengenai permukaan cermin setiap cermin pada Sudut yang sama. Untuk memudahkan persediaan, letakkan dua cermin pada kira-kira 45°. Dalam persediaan ini, sokongan kinematik pertama digunakan untuk mendapatkan kedudukan menegak dan mendatar pancaran yang diingini, manakala sokongan kedua digunakan untuk mengimbangi Sudut. Struktur Lipatan-Z ialah kaedah pilihan untuk menyasarkan berbilang pancaran laser pada sasaran yang sama. Apabila menggabungkan laser dengan panjang gelombang yang berbeza, satu atau lebih cermin mungkin perlu digantikan dengan penapis dikroik.
Untuk meminimumkan pertindihan dalam proses penjajaran, laser boleh dijajarkan pada dua titik rujukan berasingan. Penanda silang mudah atau kad putih yang ditanda dengan X adalah alat yang sangat berguna. Pertama, tetapkan titik rujukan pertama pada atau berhampiran permukaan cermin 2, sedekat mungkin dengan sasaran. Titik rujukan kedua ialah matlamat itu sendiri. Gunakan penyangga kinematik pertama untuk melaraskan kedudukan mendatar (X) dan menegak (Y) pancaran pada titik rujukan awal supaya ia sepadan dengan kedudukan sasaran yang dikehendaki. Setelah kedudukan ini dicapai, pendakap kinematik kedua digunakan untuk melaraskan ofset sudut, menghalakan pancaran laser pada sasaran sebenar. Cermin pertama digunakan untuk menghampiri penjajaran yang dikehendaki, manakala cermin kedua digunakan untuk memperhalusi penjajaran titik rujukan atau sasaran kedua.
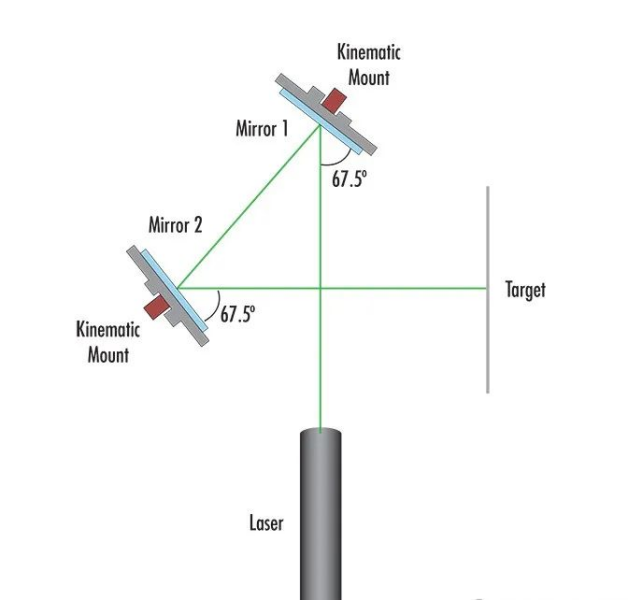
rajah 2: Struktur menegak (Rajah-4)
Struktur rajah-4 lebih kompleks daripada Lipatan-Z, tetapi boleh memberikan susun atur sistem yang lebih padat. Sama seperti struktur Lipatan-Z, susun atur rajah-4 menggunakan dua cermin yang dipasang pada pendakap bergerak. Walau bagaimanapun, tidak seperti struktur Lipatan-Z, cermin dipasang pada Sudut 67.5°, yang membentuk bentuk "4" dengan pancaran laser (Rajah 2). Persediaan ini membolehkan pemantul 2 diletakkan jauh dari laluan pancaran laser sumber. Seperti konfigurasi Lipatan-Z,pancaran laserharus dijajarkan pada dua titik rujukan, titik rujukan pertama pada cermin 2 dan yang kedua pada sasaran. Kurungan kinematik pertama digunakan untuk menggerakkan titik laser ke kedudukan XY yang dikehendaki pada permukaan cermin kedua. Kurungan kinematik kedua kemudiannya harus digunakan untuk mengimbangi anjakan sudut dan memperhalusi penjajaran pada sasaran.
Terlepas dari konfigurasi yang mana satu antara dua konfigurasi yang digunakan, prosedur di atas harus meminimumkan bilangan lelaran yang diperlukan untuk mencapai hasil yang diinginkan. Dengan alat dan peralatan yang betul serta beberapa petua mudah, penjajaran laser dapat dipermudahkan dengan sangat baik.
Masa siaran: 11 Mac 2024